Advanced Process Automation and Control (APAC) Research Group

Development, design and implementation of an integrated performance monitoring and fault detection system for gas turbines
Due to the strategic role of efficient and reliable energy production, the Iranian National Gas Company delineated and signed a contract with K N Toosi University of Technology to perform a research project on the development, design and implementation of an integrated performance monitoring and fault detection system for GT10B gas turbines and Demag Delval compressors. The key objectives of the project include:
- Development of theoretical knowledge of an integrated performance monitoring and fault detection system for gas turbines.
- Software and hardware development and online implementation of the designed integrated system in GT10B gas turbines in Qom power plant.
Development, design and implementation of an integrated performance monitoring and fault detection system for gas turbines
Due to the strategic role of efficient and reliable energy production, the Iranian National Gas Company delineated and signed a contract with K N Toosi University of Technology to perform a research project on the development, design and implementation of an integrated performance monitoring and fault detection system for GT10B gas turbines and Demag Delval compressors. The key objectives of the project include:
- Development of theoretical knowledge of an integrated performance monitoring and fault detection system for gas turbines.
- Software and hardware development and online implementation of the designed integrated system in GT10B gas turbines in Qom power plant.
Performance monitoring of industrial control systems
Closed loop control system performance degradation is inevitable in industrial control systems due to several factors such as the aging phenomenon, corrosion, parameter variations, etc. It is critical for optimal and efficient controller performance to implement an online supervisory performance monitoring (PM) system to detect any performance degradation. PM is therefore a highlighted research topic in APAC. The PM techniques for linear systems is well researched and implemented in several laboratory scale industrial case studies. The techniques are extended for nonlinear plants by developing Generalized Minimum Variance (GMV) based on the second order Voltera series modelling of nonlinear systems. Data fusion techniques are also incorporated to enhance the monitoring systems. The techniques are implemented in pH neutralization process, CSTR chemical reactors and simulated gas turbines.
Performance monitoring of industrial control systems
Closed loop control system performance degradation is inevitable in industrial control systems due to several factors such as the aging phenomenon, corrosion, parameter variations, etc. It is critical for optimal and efficient controller performance to implement an online supervisory performance monitoring (PM) system to detect any performance degradation. PM is therefore a highlighted research topic in APAC. The PM techniques for linear systems is well researched and implemented in several laboratory scale industrial case studies. The techniques are extended for nonlinear plants by developing Generalized Minimum Variance (GMV) based on the second order Voltera series modelling of nonlinear systems. Data fusion techniques are also incorporated to enhance the monitoring systems. The techniques are implemented in pH neutralization process, CSTR chemical reactors and simulated gas turbines.
Gas Turbine (Siemens V94.2) Fault Detection and Identification by using Signal based Methods
In this project, the supervised and unsupervised methods of classification are used for fault detection and identification of the Gas Turbine (GT) system. These methods are signal based approach for fault detection and identification. The performance signals of the gas turbine are acquired in normal and fault occurred conditions. Data acquired from Simani gas turbine simulated model and the Siemens V94.2 gas turbine. This Simani model is capable of simulating four common faults of gas turbine. It has been validated with a single-shaft industrial gas turbine so its performance is matching the real gas turbines performance. Thus this simulated model could be a useful instrumental for academic studies. The V94.2 gas turbine is the most useful gas turbine in the power plants in Iran. Its nominal power is 162 MW. The under taken gas turbine is stored in the 3rd plant of the Parrehsar power plant, Iran. In this research the Fuzzy CMeans, Gustafson-Kessel and Gath-Geva clustering algorithms, as unsupervised classification methods, are used to detect and identify fault. The ANFIS, MLP and RBF neural networks are used as supervised classification methods. Feature selection methods have been applied on the data set. Principal component analysis (PCA) and linear discriminant analysis (LDA) used as feature selection methods. The results show that combination of the supervised and unsupervised classification methods, able to detect and identify the normal and fault behavior of the gas turbine. Results indicate that using feature selection methods improves the performance of the fuzzy clustering algorithms. Combination of the LDA feature selection and the GK fuzzy clustering algorithm performs a considerable performance.
Gas Turbine (Siemens V94.2) Fault Detection and Identification by using Signal based Methods
In this project, the supervised and unsupervised methods of classification are used for fault detection and identification of the Gas Turbine (GT) system. These methods are signal based approach for fault detection and identification. The performance signals of the gas turbine are acquired in normal and fault occurred conditions. Data acquired from Simani gas turbine simulated model and the Siemens V94.2 gas turbine. This Simani model is capable of simulating four common faults of gas turbine. It has been validated with a single-shaft industrial gas turbine so its performance is matching the real gas turbines performance. Thus this simulated model could be a useful instrumental for academic studies. The V94.2 gas turbine is the most useful gas turbine in the power plants in Iran. Its nominal power is 162 MW. The under taken gas turbine is stored in the 3rd plant of the Parrehsar power plant, Iran. In this research the Fuzzy CMeans, Gustafson-Kessel and Gath-Geva clustering algorithms, as unsupervised classification methods, are used to detect and identify fault. The ANFIS, MLP and RBF neural networks are used as supervised classification methods. Feature selection methods have been applied on the data set. Principal component analysis (PCA) and linear discriminant analysis (LDA) used as feature selection methods. The results show that combination of the supervised and unsupervised classification methods, able to detect and identify the normal and fault behavior of the gas turbine. Results indicate that using feature selection methods improves the performance of the fuzzy clustering algorithms. Combination of the LDA feature selection and the GK fuzzy clustering algorithm performs a considerable performance.
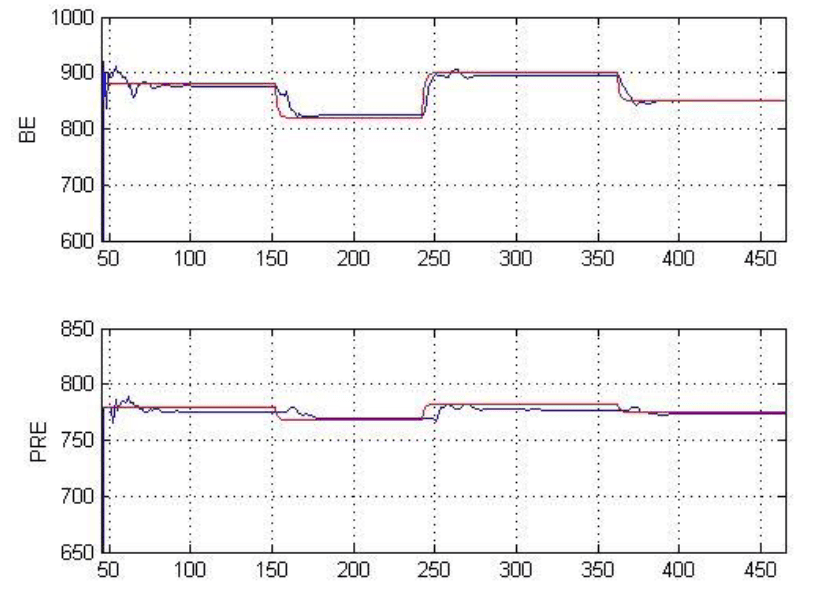
Gas Turbine Thermal Condition Monitoring using Hybrid Adaptive Threshold and Softsensors
Gas turbine, as the prime mover in fossil and combined cycle power plants, is one of the core elements of energy production. Turbine malfunctioning not only reduce the efficiency of the plant, but also will cause its damage and failure. Furthermore, it makes heavy costs on industry owners. Therefore, gas turbine condition monitoring is a logical and preventive operation to avoid damages caused by improper operation of the turbine. In this project, a new condition monitoring system to identify common faults in a gas turbine is designed. It makes use of temperature sensors data. Soft sensors and invented hybrid adaptive threshold are used for making a decision. First, a residual signal is produced using soft sensors designed by a feedforward neural network. Second, a Mamdani Fuzzy system is utilized for an online determination of parameters to generate an adaptive threshold. Usually investigations of the gas turbine are carried out on the simulator of a laboratory set up. The simulator is capable for creating various faults in three different operating points. The superiority of the designed system is specified by comparing obtained results with other research. In addition to simplicity and increasing the confidence coefficient, the system is properly sensitive to faults.
Gas Turbine Thermal Condition Monitoring using Hybrid Adaptive Threshold and Softsensors
Gas turbine, as the prime mover in fossil and combined cycle power plants, is one of the core elements of energy production. Turbine malfunctioning not only reduce the efficiency of the plant, but also will cause its damage and failure. Furthermore, it makes heavy costs on industry owners. Therefore, gas turbine condition monitoring is a logical and preventive operation to avoid damages caused by improper operation of the turbine. In this project, a new condition monitoring system to identify common faults in a gas turbine is designed. It makes use of temperature sensors data. Soft sensors and invented hybrid adaptive threshold are used for making a decision. First, a residual signal is produced using soft sensors designed by a feedforward neural network. Second, a Mamdani Fuzzy system is utilized for an online determination of parameters to generate an adaptive threshold. Usually investigations of the gas turbine are carried out on the simulator of a laboratory set up. The simulator is capable for creating various faults in three different operating points. The superiority of the designed system is specified by comparing obtained results with other research. In addition to simplicity and increasing the confidence coefficient, the system is properly sensitive to faults.
Petroleum reservoir’s P-wave velocity estimation by the use of neural networks: a fractured reservoir case study from Iran
Neural networks (NNs) are an important data driven tool for estimating and classifying petroleum reservoir properties. In this project, seismic attributes have been used to estimate well logs in a fractured reservoir case study from Iran. Three methods have been evaluated: the linear regression, the multilayer perceptron (MLP) and the radial basis function (RBF). For linear case, the selection of appropriate attributes was determined by forward selection and for nonlinear one; the selection was based on the genetic algorithm result. 10-fold cross-validation method was used to train and evaluate the predictor models to overcome the over-fitted problem occurred in the small-data-set case study. Then by adding a decision function to the designed models, the reservoir properties were classified, meanwhile the well logs were estimated. By considering correlation coefficient criterion and confidence matrix, MLP with two hidden layers had the best performance; so reservoir characterization was done by use of this network. At last, thirteen desirable areas to develop the oil field and one area with the risk of troublesome gas production were identified throughout the reservoir.
Petroleum reservoir’s P-wave velocity estimation by the use of neural networks: a fractured reservoir case study from Iran
Neural networks (NNs) are an important data driven tool for estimating and classifying petroleum reservoir properties. In this project, seismic attributes have been used to estimate well logs in a fractured reservoir case study from Iran. Three methods have been evaluated: the linear regression, the multilayer perceptron (MLP) and the radial basis function (RBF). For linear case, the selection of appropriate attributes was determined by forward selection and for nonlinear one; the selection was based on the genetic algorithm result. 10-fold cross-validation method was used to train and evaluate the predictor models to overcome the over-fitted problem occurred in the small-data-set case study. Then by adding a decision function to the designed models, the reservoir properties were classified, meanwhile the well logs were estimated. By considering correlation coefficient criterion and confidence matrix, MLP with two hidden layers had the best performance; so reservoir characterization was done by use of this network. At last, thirteen desirable areas to develop the oil field and one area with the risk of troublesome gas production were identified throughout the reservoir.
Design of Universal Control System
Nowadays, Advanced Process Control (APC) systems are widely used in industry. However, a main challenge on application of APC systems is tuning of their parameters, including model structure like model order, delay and model parameters, controller structure and parameters like control and prediction horizon in model predictive controllers, noise filters and so on. Practically, an APC expert should decide on them through some experimental test in the site. Every re-tuning of controller also needs the presence of experts. This increases the commissioning and operational costs of APC, one of the main reason that many industries avoid using APC systems. By UCS, we developed an APC that only needs some operational available information, like the tag number of MV and CV, acceptable setpoint and MV step changes and so on. This make the APC design a kind of plug-and-play procedure that can be handled by in residence automation engineers at the plant site. Both PID and APC controllers are automatically designed through some carefully, yet universally, step by step experiments. UCS has already been tested on some process systems, including level, flow, temperature, pressure and pH neutralization pilot plants.
Design of Universal Control System
Nowadays, Advanced Process Control (APC) systems are widely used in industry. However, a main challenge on application of APC systems is tuning of their parameters, including model structure like model order, delay and model parameters, controller structure and parameters like control and prediction horizon in model predictive controllers, noise filters and so on. Practically, an APC expert should decide on them through some experimental test in the site. Every re-tuning of controller also needs the presence of experts. This increases the commissioning and operational costs of APC, one of the main reason that many industries avoid using APC systems. By UCS, we developed an APC that only needs some operational available information, like the tag number of MV and CV, acceptable setpoint and MV step changes and so on. This make the APC design a kind of plug-and-play procedure that can be handled by in residence automation engineers at the plant site. Both PID and APC controllers are automatically designed through some carefully, yet universally, step by step experiments. UCS has already been tested on some process systems, including level, flow, temperature, pressure and pH neutralization pilot plants.
State estimation and fusion in the presence of integrated measurement
When a sample of material is sent to laboratory for analysis, a common practice is to gradually collect small amounts of material over a period in a container and send the collection to the laboratory at the end of the sampling period. In this case, laboratory measures the average of the variable during that period. Experienced operators can use this measurement to improve operation of the process. However, including this integrated slow rate measurement into the process control and monitoring system is a challenging problem. In this research, we are developing required theories to include these measurements in control loop design. These include state estimation, system identification and controller design methods.
State estimation and fusion in the presence of integrated measurement
When a sample of material is sent to laboratory for analysis, a common practice is to gradually collect small amounts of material over a period in a container and send the collection to the laboratory at the end of the sampling period. In this case, laboratory measures the average of the variable during that period. Experienced operators can use this measurement to improve operation of the process. However, including this integrated slow rate measurement into the process control and monitoring system is a challenging problem. In this research, we are developing required theories to include these measurements in control loop design. These include state estimation, system identification and controller design methods.
Plantwide optimization
Scheduling and planning of operations holds importance in any process industry. In a project, a member of APAC worked on it during his research visit to the University of Alberta, the steam/water distribution optimization was studied for SAGD oil production process. In SAGD process, steam is an important utility. Water is treated and fed to steam generators. The network has excess processing capacity. Tanks are provided upstream of water treatment and steam generator units. In the event of planned or unplanned shutdowns, operators must divert production to other units and make efficient use of limited tank volumes to minimize any drop-in processing capacity during the transition. Operators would like to have a tool which they can use to assess or improve their decision making during such situations. The objective was to find an effective tool which can provide a solution to this problem quickly and guide the operators in their decision making. In this project the problem was formulated as two consecutive constraint optimization problem, which were solved online and optimized steam/water distribution was provided to operators.
Plantwide optimization
Scheduling and planning of operations holds importance in any process industry. In a project, a member of APAC worked on it during his research visit to the University of Alberta, the steam/water distribution optimization was studied for SAGD oil production process. In SAGD process, steam is an important utility. Water is treated and fed to steam generators. The network has excess processing capacity. Tanks are provided upstream of water treatment and steam generator units. In the event of planned or unplanned shutdowns, operators must divert production to other units and make efficient use of limited tank volumes to minimize any drop-in processing capacity during the transition. Operators would like to have a tool which they can use to assess or improve their decision making during such situations. The objective was to find an effective tool which can provide a solution to this problem quickly and guide the operators in their decision making. In this project the problem was formulated as two consecutive constraint optimization problem, which were solved online and optimized steam/water distribution was provided to operators.
Causality study on the Effect of Caustic on Bitumen Recovery
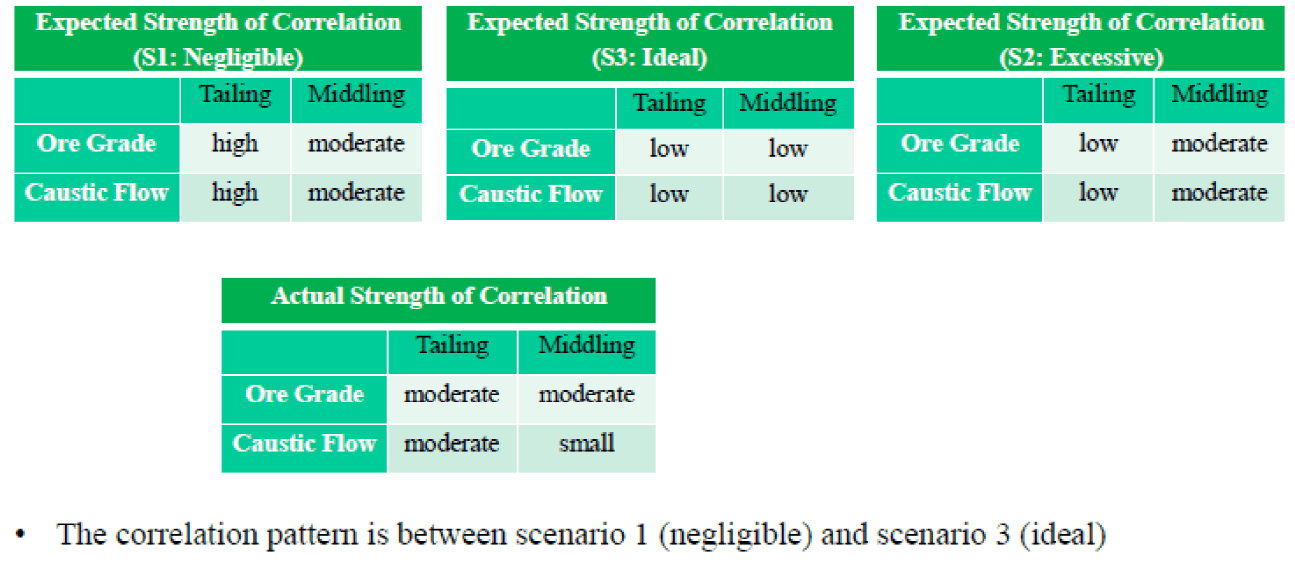
In a project, a member of APAC worked on it during his research visit to the University of Alberta, the actual effect of caustic addition on bitumen recovery rate was evaluated based on analyzing the routine operational data. It is theoretically and experimentally shown in the literature that caustic addition helps bitumen recovery when ore grade is low. However, this effect has not been clearly observed from the operational data. Therefore, this project aimed to discovering if the data shows a relation between caustic addition and recovery rate and proposing how to improve caustic control guideline for better recovery rate if possible. The fact that caustic may only have an impact in some situations and not in others, in addition to lack of necessary important measurements, large noise amplitude and complexity of the process, made it challenging to evaluate the actual effect of caustic on recovery rate based on historical data. A combination of careful data analysis with the process knowledge showed that caustic in general has improved the recovery rate in the understudy plant operation, but the improvement might not be observed by the operators due to the less improvement than expected, time delay, slow rate measurement of recovery, and some other relevant factors.
Causality study on the Effect of Caustic on Bitumen Recovery
In a project, a member of APAC worked on it during his research visit to the University of Alberta, the actual effect of caustic addition on bitumen recovery rate was evaluated based on analyzing the routine operational data. It is theoretically and experimentally shown in the literature that caustic addition helps bitumen recovery when ore grade is low. However, this effect has not been clearly observed from the operational data. Therefore, this project aimed to discovering if the data shows a relation between caustic addition and recovery rate and proposing how to improve caustic control guideline for better recovery rate if possible. The fact that caustic may only have an impact in some situations and not in others, in addition to lack of necessary important measurements, large noise amplitude and complexity of the process, made it challenging to evaluate the actual effect of caustic on recovery rate based on historical data. A combination of careful data analysis with the process knowledge showed that caustic in general has improved the recovery rate in the understudy plant operation, but the improvement might not be observed by the operators due to the less improvement than expected, time delay, slow rate measurement of recovery, and some other relevant factors.

سیستم كنترل عمومی (UCS)
با گسترش بهكارگیری روشهای پیشرفته كنترل فرآیند، در سالهای اخیر موضوع امكان طراحی اتوماتیك كنترلكننده، بر اساس معیارهای مشخص مورد توجه قرارگرفتهاست. كه به طور عام به آن روشهای خودتنظیم یا سیستم های كنترل عمومی میگویند. هدف اصلی در این پروژه، طراحی و ساخت سیستم كنترلی است كه با دریافت اطلاعات عمومی از فرآیند كه به راحتی توسط مهندسان فرآیند قابل ارائه است و همچنین انتقال دادههای ورودی و خروجی فرآیند از بخش اتوماسیون (كه در اینجا مبتنی بر استاندارد OPC میباشد) و با انجام یكسری آزمایشهای لازم، بدون آنكه فرآیند را در شرایط نامطلوب قراردهد، به صورت اتوماتیك برای طیف وسیعی از فرآیندهای معمول صنعتی كنترلكننده مناسبی ارائه دهد. این سیستم تا كنون بر روی فرآیندهای آزمایشگاهی نمونه (pilot plant) كنترل pH، كنترل فشار هوا، كنترل حرارت، كنترل سطح و كنترل جریان مایع با موفقیت اعمال شدهاست.

سیستم كنترل عمومی (UCS)
با گسترش بهكارگیری روشهای پیشرفته كنترل فرآیند، در سالهای اخیر موضوع امكان طراحی اتوماتیك كنترلكننده، بر اساس معیارهای مشخص مورد توجه قرارگرفتهاست. كه به طور عام به آن روشهای خودتنظیم یا سیستم های كنترل عمومی میگویند. هدف اصلی در این پروژه، طراحی و ساخت سیستم كنترلی است كه با دریافت اطلاعات عمومی از فرآیند كه به راحتی توسط مهندسان فرآیند قابل ارائه است و همچنین انتقال دادههای ورودی و خروجی فرآیند از بخش اتوماسیون (كه در اینجا مبتنی بر استاندارد OPC میباشد) و با انجام یكسری آزمایشهای لازم، بدون آنكه فرآیند را در شرایط نامطلوب قراردهد، به صورت اتوماتیك برای طیف وسیعی از فرآیندهای معمول صنعتی كنترلكننده مناسبی ارائه دهد. این سیستم تا كنون بر روی فرآیندهای آزمایشگاهی نمونه (pilot plant) كنترل pH، كنترل فشار هوا، كنترل حرارت، كنترل سطح و كنترل جریان مایع با موفقیت اعمال شدهاست.

توسعه، طراحی و ساخت سیستم مجتمع پایش عملکرد و تشخیص عیب توربین گازی
با علم به اهمیت بهره وری در بخشهای صنعت و انرژی در کشور، شرکت ملی گاز ایران از طریق بخش مدیریت پژوهش و فناوری آن سازمان در سال 1387 قراردادی برای یک پروژه پژوهشی را با عنوان پروژه «توسعه، طراحی و ساخت سیستم مجتمع پایش عملکرد و تشخیص خطا توربین گازی GT10B و کمپرسور Demag Delaval» با دانشگاه صنعتی خواجه نصیرالدین طوسی به امضا رساند. هدف اصلی این پژوهش کاملا کاربردی توسعه نظری دانش تشخیص عیب و پایش سلامت توربینهای گازی در کشور است و فاز اجرایی این پروژه علاوه بر طراحی نرم افزار شامل طراحی، ساخت و خرید سخت افزار و انتگراسیون و نصب کامل مجموعه بر روی سه واحد توربوکمپرسور GT10B نصب شده در ایستگاه تقویت فشار خط سوم گاز سراسری (قم 3) است. در این پژوهش بر اساس روش آنالیز مسیر گاز، تئوریهای تخمین غیر خطی و طبقه بندی فازی، یک سیستم جامع برای تشخیص عیب در توربینهای گازی صنعتی توسعه داده شد.

توسعه، طراحی و ساخت سیستم مجتمع پایش عملکرد و تشخیص عیب توربین گازی
با علم به اهمیت بهره وری در بخشهای صنعت و انرژی در کشور، شرکت ملی گاز ایران از طریق بخش مدیریت پژوهش و فناوری آن سازمان در سال 1387 قراردادی برای یک پروژه پژوهشی را با عنوان پروژه «توسعه، طراحی و ساخت سیستم مجتمع پایش عملکرد و تشخیص خطا توربین گازی GT10B و کمپرسور Demag Delaval» با دانشگاه صنعتی خواجه نصیرالدین طوسی به امضا رساند. هدف اصلی این پژوهش کاملا کاربردی توسعه نظری دانش تشخیص عیب و پایش سلامت توربینهای گازی در کشور است و فاز اجرایی این پروژه علاوه بر طراحی نرم افزار شامل طراحی، ساخت و خرید سخت افزار و انتگراسیون و نصب کامل مجموعه بر روی سه واحد توربوکمپرسور GT10B نصب شده در ایستگاه تقویت فشار خط سوم گاز سراسری (قم 3) است. در این پژوهش بر اساس روش آنالیز مسیر گاز، تئوریهای تخمین غیر خطی و طبقه بندی فازی، یک سیستم جامع برای تشخیص عیب در توربینهای گازی صنعتی توسعه داده شد.

زیمنس با رویکرد بر اساس سیگنال v94.2 تشخیص و شناسایی خطا در توربین گاز
در این پروژه از دو روش دستهبندی کنندههای نظارتی و غیرنظارتی، بهعنوان روشهای مبتنی بر سیگنال، برای آشکارسازی و تشخیص عیب در سیستم غیرخطی توربینهای گازی بهره گرفته شده است. برای این منظور از دادههای عملکردی توربین گازی که در شرایط نرمال و معیوب توربین ثبت شدهاند، استفاده شده است. دادهها از دو منبع مختلف بدست آمدهاند، که شامل دادههای ثبتشده از شبیهساز Simani و نیز دادههای واقعی توربین گازی میباشند. دادههای تجربی، از توربین گازیv94.2 زیمنس، که یکی از توربینهای پرکاربرد در نیروگاههای کشور است، ثبت شده است. این توربین یک توربین گازی تک شفت با توان نامی 162 مگاوات میباشد و در واحد شماره 3 نیروگاه سیکل ترکیبی پرهسر گیلان یا سایر نیروگاه¬های فعال کشور همانند شیراز و … نصب شده است. شبیهساز Simani یک شبیهساز دقیق و معتبر برای توربینهای گازی تک شفت میباشد، که توانایی مدل کردن چهار نوع از عیبهای رایج توربینهای گازی را دارا میباشد. از الگوریتمهای خوشهبندی فازی Fuzzy C-Means، Gustafson-Kessel و Gath-Geva بهعنوان دستهبندی کنندههای غیرنظارتی و از دستهبندی کنندههای ANFIS، MLP و RBF بهعنوان دستهبندی کنندههای نظارتی، استفاده شده است. برای کاهش بعد دادهها از روشهای کاهش بعد آنالیز اجزای اصلی، بهعنوان یک روش غیرنظارتی، و روش آنالیز تفکیک خطی، بهعنوان یک روش نظارتی، استفاده شده است.

زیمنس با رویکرد بر اساس سیگنال v94.2 تشخیص و شناسایی خطا در توربین گاز
در این پروژه از دو روش دستهبندی کنندههای نظارتی و غیرنظارتی، بهعنوان روشهای مبتنی بر سیگنال، برای آشکارسازی و تشخیص عیب در سیستم غیرخطی توربینهای گازی بهره گرفته شده است. برای این منظور از دادههای عملکردی توربین گازی که در شرایط نرمال و معیوب توربین ثبت شدهاند، استفاده شده است. دادهها از دو منبع مختلف بدست آمدهاند، که شامل دادههای ثبتشده از شبیهساز Simani و نیز دادههای واقعی توربین گازی میباشند. دادههای تجربی، از توربین گازیv94.2 زیمنس، که یکی از توربینهای پرکاربرد در نیروگاههای کشور است، ثبت شده است. این توربین یک توربین گازی تک شفت با توان نامی 162 مگاوات میباشد و در واحد شماره 3 نیروگاه سیکل ترکیبی پرهسر گیلان یا سایر نیروگاه¬های فعال کشور همانند شیراز و … نصب شده است. شبیهساز Simani یک شبیهساز دقیق و معتبر برای توربینهای گازی تک شفت میباشد، که توانایی مدل کردن چهار نوع از عیبهای رایج توربینهای گازی را دارا میباشد. از الگوریتمهای خوشهبندی فازی Fuzzy C-Means، Gustafson-Kessel و Gath-Geva بهعنوان دستهبندی کنندههای غیرنظارتی و از دستهبندی کنندههای ANFIS، MLP و RBF بهعنوان دستهبندی کنندههای نظارتی، استفاده شده است. برای کاهش بعد دادهها از روشهای کاهش بعد آنالیز اجزای اصلی، بهعنوان یک روش غیرنظارتی، و روش آنالیز تفکیک خطی، بهعنوان یک روش نظارتی، استفاده شده است.

در بازده جداسازی نفت از خاک NAOH بررسی درستی تاثیر تزریق
جداسازی نفت از خاک و آب اولین مرحله از استخراج نفت در مخازن نفت سنگ (oil sands) است که در واحد جداسازی (Extraction) انجام میپذیرد. برای بهبود این جداسازی سود سوزآور (NAOH) همراه با آب گرم به مخلوط اضافه می شود. تحقیقات آزمایشگاهی نشان داده است که اضافه کردن مقدار مناسبی از سود، راندمان جداسازی را تا 20 درصد افزایش میدهد. در عین حال تزریق بیش از حد سود بازده را پایین خواهد آورد. اما در عمل میزان بهبود مورد انتظار در جداسازی بسیار کمتر و در محدوده چند درصد است. علت آن عدم امکان اندازه گیری دقیق و آنی پارامترهای مورد نیاز برای تعیین میزان سود و همچنین وجود چندین مسیر موازی ورود و آماده سازی مواد است. به همین دلیل بین کارشناسان و بهرهبرداران اختلاف نظر جدی در مورد تاثیرگذاری واقعی تزریق سود در بهبود جداسازی وجود دارد. بر این اساس پروژهای با هدف بررسی درستی تاثیر تزریق سود در بازده جداسازی نفت تعریف شد. برای رسیدن به این هدف، تحلیل اثرگذاری تزریق سود بر بازده جداسازی براساس آنالیزهای همبستگی (Correlation) و علّیت (Causality) انجام شد. برای رسیدن به یک نتیجه مطمئن لازم بود اثر سایر عوامل محتمل تاثیرگذار بررسی و در صورت اهمیت مورد توجه قرار گیرد. در نهایت، مشخص شد که الگوی تاثیر تزریق سود در ناحیهای بین الگوی عدم تزریق سود و الگوی تزریق ایدهآل آن است. این به معنی آن است که سود تزریق شده موثر بوده است اما بازده آن کافی نیست و لازم است با تزریق بیشتر سود و یا کنترل بهتر میزان تزریق آن بازده جداسازی بهبود یابد.
* این پروژه توسط یکی از اعضای گروه پژوهشی اِیپک در دانشگاه آلبرتا کانادا و به سفارش شرکت نفت سینکرود انجام شده است.

در بازده جداسازی نفت از خاک NAOH بررسی درستی تاثیر تزریق
جداسازی نفت از خاک و آب اولین مرحله از استخراج نفت در مخازن نفت سنگ (oil sands) است که در واحد جداسازی (Extraction) انجام میپذیرد. برای بهبود این جداسازی سود سوزآور (NAOH) همراه با آب گرم به مخلوط اضافه می شود. تحقیقات آزمایشگاهی نشان داده است که اضافه کردن مقدار مناسبی از سود، راندمان جداسازی را تا 20 درصد افزایش میدهد. در عین حال تزریق بیش از حد سود بازده را پایین خواهد آورد. اما در عمل میزان بهبود مورد انتظار در جداسازی بسیار کمتر و در محدوده چند درصد است. علت آن عدم امکان اندازه گیری دقیق و آنی پارامترهای مورد نیاز برای تعیین میزان سود و همچنین وجود چندین مسیر موازی ورود و آماده سازی مواد است. به همین دلیل بین کارشناسان و بهرهبرداران اختلاف نظر جدی در مورد تاثیرگذاری واقعی تزریق سود در بهبود جداسازی وجود دارد. بر این اساس پروژهای با هدف بررسی درستی تاثیر تزریق سود در بازده جداسازی نفت تعریف شد. برای رسیدن به این هدف، تحلیل اثرگذاری تزریق سود بر بازده جداسازی براساس آنالیزهای همبستگی (Correlation) و علّیت (Causality) انجام شد. برای رسیدن به یک نتیجه مطمئن لازم بود اثر سایر عوامل محتمل تاثیرگذار بررسی و در صورت اهمیت مورد توجه قرار گیرد. در نهایت، مشخص شد که الگوی تاثیر تزریق سود در ناحیهای بین الگوی عدم تزریق سود و الگوی تزریق ایدهآل آن است. این به معنی آن است که سود تزریق شده موثر بوده است اما بازده آن کافی نیست و لازم است با تزریق بیشتر سود و یا کنترل بهتر میزان تزریق آن بازده جداسازی بهبود یابد.
* این پروژه توسط یکی از اعضای گروه پژوهشی اِیپک در دانشگاه آلبرتا کانادا و به سفارش شرکت نفت سینکرود انجام شده است.

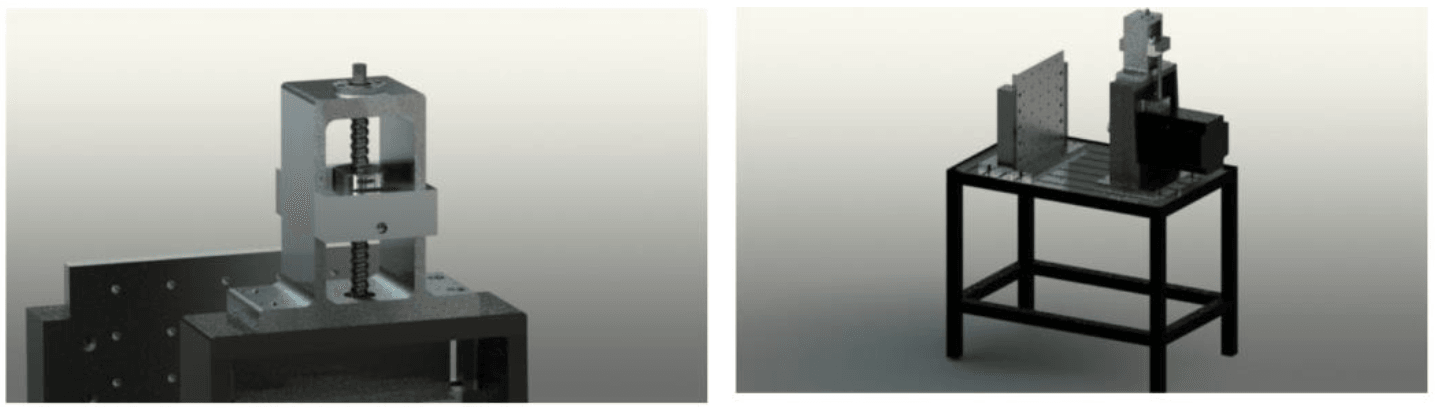
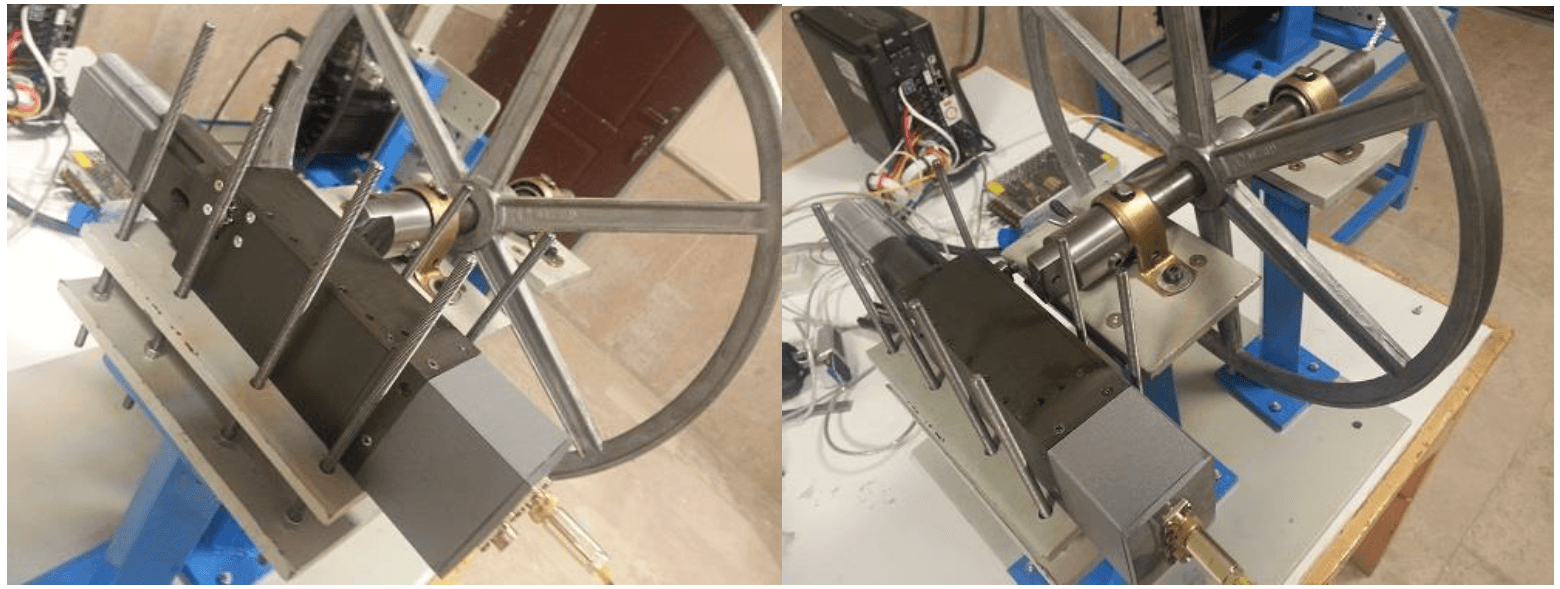
طراحی و ساخت سیستم الکترو مکانیکی برای شبیه ساز بار آیرودینامیکی
با وجود نیروهای طبیعی مزاحم در محیط¬های عملکردی سیستمهای پروازی، مهندسین با چالش پیدا کردن تکنیک¬ها و ابزارهایی برای تست و اعتبار سنجی عملگر این دستگاه¬ها در مواجهه با این با آیرودینامیکی هستند. از این رو شبیه ¬سازی که بتواند شرایط طبیعی را در آزمایشگاه مهیا کند بسیار مفید است. شبیه ساز بار دینامیکی یکی از مهمترین ابزارهای تست پایداری و عملکردی عملگرهای سطوح کنترلی در وسایل پروازی است.
در عمل برای ایجاد بار دینامیکی از عملگرهای الکترومکانیکی، الکتروهیدرولیکی و الکتروهیدرواستاتیکی استفاده می شود. این شبیه ساز با قابلیت پهنای باند مناسب برای شبیه¬سازی محیط¬های پروازی طراحی و ساخته شده است.

طراحی و ساخت سیستم الکترو مکانیکی برای شبیه ساز بار آیرودینامیکی
با وجود نیروهای طبیعی مزاحم در محیط¬های عملکردی سیستمهای پروازی، مهندسین با چالش پیدا کردن تکنیک¬ها و ابزارهایی برای تست و اعتبار سنجی عملگر این دستگاه¬ها در مواجهه با این با آیرودینامیکی هستند. از این رو شبیه ¬سازی که بتواند شرایط طبیعی را در آزمایشگاه مهیا کند بسیار مفید است. شبیه ساز بار دینامیکی یکی از مهمترین ابزارهای تست پایداری و عملکردی عملگرهای سطوح کنترلی در وسایل پروازی است.
در عمل برای ایجاد بار دینامیکی از عملگرهای الکترومکانیکی، الکتروهیدرولیکی و الکتروهیدرواستاتیکی استفاده می شود. این شبیه ساز با قابلیت پهنای باند مناسب برای شبیه¬سازی محیط¬های پروازی طراحی و ساخته شده است.

پايش عملکرد سيستمهای کنترل
معمولاً بعد از گذشت زمانی از شروع به کار سيستم کنترل، عواملی مانند تغييرات در مشخصات مواد مورد استفاده و يا تغييرات در وضعيت تجهيزات سيستم (کهنگی ، جرمگرفتگی ، خوردگی و …) و یا مشخصات محصول تولیدی مورد تقاضا ممکن است منجر به افت عملکرد سيستم کنترل شوند. بنابراين در يک سيستم کنترل، بهمنظور تشخيص کاهش کیفیت عملکرد آن، بايستی نظارت بر حلقههای کنترلی انجام شود. اين امر بسيار مهم، امروزه تحت عنوان پايش عملکرد سيستمهای کنترل مطرح است.
موضوع پایش عملکرد به طور ویژهای در گروه پژوهشی اِیپک مورد توجه قرار گرفته و تحقیقات زیادی در جهت ارائه راهکارهای جدید برای سیستمهای صنعتی به انجام رسیده است. به طور خاص تحقیقات برای ارائه شاخصهایی برای ارزیابی عملکرد سیستمهای چندمتغیره و سیستمهای غیرخطی مد نظر جدی قرار گرفته است. طراحی کنترلکننده حداقل واريانس (MV) و نسخه تعميميافته آن (GMV) برای سيستمهای غيرخطی که قابل مدلسازی توسط سری ولترای مرتبه دوم باشند، ارائه شاخصی برای سنجش کیفیت عملکرد کنترل کنندههای غیرخطی در مقاسیه با کنترل کننده فیدبک خطی ساز از جمله این روشها است. در عین حال تعمیم روشهای مبتنی بر شاخص حداقل واریانس خطی و غیرخطی به سیستمهای چندمتغیره امکان ارزیابی انواع سیستمهای صنعتی بزرگ را فراهم نموده است. از سوی دیگر، از آنجایی که هر شاخص ارزیابی بر پایش نوع خاصی از ناکارآمدی متمرکز بوده و تصميمگيری بر اساس هر کدام از اين شاخصها بهطور مجزا میتواند با نايقينی همراه باشد، لذا موضوع استفاده از ترکیب شاخصها (Fusion) برای پايش عملکرد سیستمهای کنترل و تشخیص منبع ناکارآمدی مورد توجه قرار گرفته و روشهایی برپایه روشهای استنتاج احتمالاتی و فازی ارائه شده است. اکثر روشهای ارائه شده توسط محققان گروه پژوهشی بر روی فرآیندهای پایلوت از جمله فرآیند خنثیسازی pH و یا شبیهسازهای صنعتی مانند شبیهساز توربین گاز و رآکتورهای شیمیایی CSTR پیادهسازی شدهاند.

پايش عملکرد سيستمهای کنترل
معمولاً بعد از گذشت زمانی از شروع به کار سيستم کنترل، عواملی مانند تغييرات در مشخصات مواد مورد استفاده و يا تغييرات در وضعيت تجهيزات سيستم (کهنگی ، جرمگرفتگی ، خوردگی و …) و یا مشخصات محصول تولیدی مورد تقاضا ممکن است منجر به افت عملکرد سيستم کنترل شوند. بنابراين در يک سيستم کنترل، بهمنظور تشخيص کاهش کیفیت عملکرد آن، بايستی نظارت بر حلقههای کنترلی انجام شود. اين امر بسيار مهم، امروزه تحت عنوان پايش عملکرد سيستمهای کنترل مطرح است.
موضوع پایش عملکرد به طور ویژهای در گروه پژوهشی اِیپک مورد توجه قرار گرفته و تحقیقات زیادی در جهت ارائه راهکارهای جدید برای سیستمهای صنعتی به انجام رسیده است. به طور خاص تحقیقات برای ارائه شاخصهایی برای ارزیابی عملکرد سیستمهای چندمتغیره و سیستمهای غیرخطی مد نظر جدی قرار گرفته است. طراحی کنترلکننده حداقل واريانس (MV) و نسخه تعميميافته آن (GMV) برای سيستمهای غيرخطی که قابل مدلسازی توسط سری ولترای مرتبه دوم باشند، ارائه شاخصی برای سنجش کیفیت عملکرد کنترل کنندههای غیرخطی در مقاسیه با کنترل کننده فیدبک خطی ساز از جمله این روشها است. در عین حال تعمیم روشهای مبتنی بر شاخص حداقل واریانس خطی و غیرخطی به سیستمهای چندمتغیره امکان ارزیابی انواع سیستمهای صنعتی بزرگ را فراهم نموده است. از سوی دیگر، از آنجایی که هر شاخص ارزیابی بر پایش نوع خاصی از ناکارآمدی متمرکز بوده و تصميمگيری بر اساس هر کدام از اين شاخصها بهطور مجزا میتواند با نايقينی همراه باشد، لذا موضوع استفاده از ترکیب شاخصها (Fusion) برای پايش عملکرد سیستمهای کنترل و تشخیص منبع ناکارآمدی مورد توجه قرار گرفته و روشهایی برپایه روشهای استنتاج احتمالاتی و فازی ارائه شده است. اکثر روشهای ارائه شده توسط محققان گروه پژوهشی بر روی فرآیندهای پایلوت از جمله فرآیند خنثیسازی pH و یا شبیهسازهای صنعتی مانند شبیهساز توربین گاز و رآکتورهای شیمیایی CSTR پیادهسازی شدهاند.

SAGD بهینه سازی سیستم توزیع آب/بخار در فرآیند استخراج نفت به روش
برای استخراج نفت از مخازن نفت-سنگ (oil sands) که در عمق زمین قرار دارند از روش Steam Assisted Gravity Drainage (SAGD) استفاده میشود که در آن بخار به مخزن جهت جداسازی نفت از سنگ تزریق میشود. در این روش مخلوط نفت و آب از عمق زمین به سطح آورده میشود. سپس نفت از مخلوط جدا شده و به واحدهای پایین دستی تزریق میشود. آب باقیمانده برای تولید مخار مجددا به مولدهای بخار ارسال می شود. اما این آب دارای مقدار کمی ناخالصی است که لازم است قبل از ورود به مولدهای بخار در واحد پردازش آب (water treatment) از آن جدا شود. معمولا چند واحد پردازش آب به صورت موازی وجود دارد که امکان انتقال آب بین آنها نیز تعبیه میشود. در نتیجه در صورتی که بخشی از یکی از این واحدها دچار مشکلی گردد، بهرهبرداران با هدایت آب/بخار بین این واحدها سعی در بالاتر بردن بازده تولید بخار دارند. در این پروژه که به سفارش شرکت نفت سانکور کانادا انجام شده است، هدف طراحی سیستم بهینه سازی توزیع آب/ بخار بین این واحدها بوده است. برای این کار مدلی از رفتار بخشهای مختلف واحدهای پردازش آب و ارتباط بین آنها ایجاد شد. سپس با تعریف تابع بهینه سازی مسئله توزیع بهینه آب/بخار حل شده است. روش ارائه شده به گونه ایست که امکان استفاده از ظرفیت مخازن و زمان باقی مانده برای پر یا خالی شدن آنها را نیز در حل مسئله بهینه سازی مد نظر قرار می دهد.
* این پروژه با همکاری یکی از اعضای گروه پژوهشی اِیپک در دانشگاه آلبرتا کانادا و به سفارش شرکت نفت سانکور (Sancor) انجام شده است.


SAGD بهینه سازی سیستم توزیع آب/بخار در فرآیند استخراج نفت به روش
برای استخراج نفت از مخازن نفت-سنگ (oil sands) که در عمق زمین قرار دارند از روش Steam Assisted Gravity Drainage (SAGD) استفاده میشود که در آن بخار به مخزن جهت جداسازی نفت از سنگ تزریق میشود. در این روش مخلوط نفت و آب از عمق زمین به سطح آورده میشود. سپس نفت از مخلوط جدا شده و به واحدهای پایین دستی تزریق میشود. آب باقیمانده برای تولید مخار مجددا به مولدهای بخار ارسال می شود. اما این آب دارای مقدار کمی ناخالصی است که لازم است قبل از ورود به مولدهای بخار در واحد پردازش آب (water treatment) از آن جدا شود. معمولا چند واحد پردازش آب به صورت موازی وجود دارد که امکان انتقال آب بین آنها نیز تعبیه میشود. در نتیجه در صورتی که بخشی از یکی از این واحدها دچار مشکلی گردد، بهرهبرداران با هدایت آب/بخار بین این واحدها سعی در بالاتر بردن بازده تولید بخار دارند. در این پروژه که به سفارش شرکت نفت سانکور کانادا انجام شده است، هدف طراحی سیستم بهینه سازی توزیع آب/ بخار بین این واحدها بوده است. برای این کار مدلی از رفتار بخشهای مختلف واحدهای پردازش آب و ارتباط بین آنها ایجاد شد. سپس با تعریف تابع بهینه سازی مسئله توزیع بهینه آب/بخار حل شده است. روش ارائه شده به گونه ایست که امکان استفاده از ظرفیت مخازن و زمان باقی مانده برای پر یا خالی شدن آنها را نیز در حل مسئله بهینه سازی مد نظر قرار می دهد.
* این پروژه با همکاری یکی از اعضای گروه پژوهشی اِیپک در دانشگاه آلبرتا کانادا و به سفارش شرکت نفت سانکور (Sancor) انجام شده است.

طراحی و ساخت عملگرهای الکترومکانیکی و الکتروهیدرواستاتیکی
عملگرها که در حلقه کنترلی نقش اجرا کننده دستورات کنترلی را بازی میکنند؛ بنابر موارد استفاده؛ فاکتورها و مشخصات خاصی را دارا هستند. یک نوع ازعملگرهایی که در صنایع مختلف به کار می رود “عملگرهای الکترومکانیکی” است. خصوصیات منحصر به فرد این نوع از عملگرها همچون توان مورد نیاز کم برای راه اندازی انعطاف پذیری بالا در انتخاب قطعات، قیمت پایین نسبت به سایر عملگرهای با کاربرد مشابه عملکرد مناسب و همخوانی عملکرد در کاربردها، راحتی چک کردن و تعمیر نسبت به دیگر عملگرها بسیاری از صنایع را به این نتیجه رسانده است که استفاده ازعملگر الکترومکانیکی می بایست در اولویت انتخاب مهندسان طراح قرارگیرد. این نمونه تمامی تست¬ها اعم از ارتعاش، شوک مکانیکی دما پائین – دما بالا و بار مکانیکی را با موفقیت پشت سرگذاشته است. عملگر الکترومکانیکی ارتقایافته، عملکرد خوبی دارد ولی بهترین عملکرد آن تنها قابل مقایسه با عملگر الکتروهیدرولیکی است که این موضوع عملگر الکترومکانیکی را در بهترین حالت هم مرتبه با عملگر الکتروهیدرولیکی قرار میدهد. عملگرهای الکتروهیدرواستاتیکی و DDV نه تنها عملکردی بهتر از الکتروهیدرولیکی دارند بلکه مزایایی علاوه بر آن دارند.
طراحی و ساخت عملگرهای الکترومکانیکی و الکتروهیدرواستاتیکی
عملگرها که در حلقه کنترلی نقش اجرا کننده دستورات کنترلی را بازی میکنند؛ بنابر موارد استفاده؛ فاکتورها و مشخصات خاصی را دارا هستند. یک نوع ازعملگرهایی که در صنایع مختلف به کار می رود “عملگرهای الکترومکانیکی” است. خصوصیات منحصر به فرد این نوع از عملگرها همچون توان مورد نیاز کم برای راه اندازی انعطاف پذیری بالا در انتخاب قطعات، قیمت پایین نسبت به سایر عملگرهای با کاربرد مشابه عملکرد مناسب و همخوانی عملکرد در کاربردها، راحتی چک کردن و تعمیر نسبت به دیگر عملگرها بسیاری از صنایع را به این نتیجه رسانده است که استفاده ازعملگر الکترومکانیکی می بایست در اولویت انتخاب مهندسان طراح قرارگیرد. این نمونه تمامی تست¬ها اعم از ارتعاش، شوک مکانیکی دما پائین – دما بالا و بار مکانیکی را با موفقیت پشت سرگذاشته است. عملگر الکترومکانیکی ارتقایافته، عملکرد خوبی دارد ولی بهترین عملکرد آن تنها قابل مقایسه با عملگر الکتروهیدرولیکی است که این موضوع عملگر الکترومکانیکی را در بهترین حالت هم مرتبه با عملگر الکتروهیدرولیکی قرار میدهد. عملگرهای الکتروهیدرواستاتیکی و DDV نه تنها عملکردی بهتر از الکتروهیدرولیکی دارند بلکه مزایایی علاوه بر آن دارند.

تشخیص عیب و طراحی کنترل کننده فازی براي کوره سيمان
از اولين سالهاي معرفي کنترل کنندههاي فازي بحث بکارگيري آنان به عنوان کنترل کننده کورههاي دوار سيمان مورد توجه بوده است. علت اين توجه از يک طرف پيچيدگي ديناميک عملکرد کورههاي دوار است که استفاده از ساير روشهاي پيشرفته کنترل در آنها را با دشواري و تا حدود زيادي ناممکن نموده است و از طرف ديگر استفاده بهرهبرداران کوره از قواعد بهرهبرداري است. اين قواعد ساختاري نزديک به قواعد بکار رفته در منطق فازي دارند. نتيجه آن ارائه کنترل کنندههاي فازي توسط سازندگان بزرگ سيستمهاي کنترل کارخانههاي سيمان است. در همين راستا و با هدف قراردادن طراحي و ساخت چنين سيستمي در کشور، محققان اين گروه با همکاري کارشناسان شرکت سيمان ساوه در اين راه قدم گذاشتهاند. هم اکنون با توجه به اطلاعات اندازهگيري شده از کوره سيمان سفيد ساوه يک شبيهساز هوشمند (سیمولاتور) براساس شبکههاي عصبي براي کوره ايجاد شده است. سپس بر اساس اين شبيهساز، کنترل کننده فازي براي کوره طراحي و برروي شبيهساز آزمايش شده است. علاوه بر آن با تحلیل دادههای دریافتی از کوره و آنالیز آنها مسئله تشخیص عیب یا ناهنجاری در عمکرد کوره مورد توجه قرار گرفته و در نتیجه پیشآمدن پدیدههای از جمله عیب گرفتگی ورودی کوره، پیش گرمی یا پیش سردی مواد و گرفتگی داخل کوره (کوتینگ) در عملکرد کوره تشخیص داده شده است.

تشخیص عیب و طراحی کنترل کننده فازی براي کوره سيمان
از اولين سالهاي معرفي کنترل کنندههاي فازي بحث بکارگيري آنان به عنوان کنترل کننده کورههاي دوار سيمان مورد توجه بوده است. علت اين توجه از يک طرف پيچيدگي ديناميک عملکرد کورههاي دوار است که استفاده از ساير روشهاي پيشرفته کنترل در آنها را با دشواري و تا حدود زيادي ناممکن نموده است و از طرف ديگر استفاده بهرهبرداران کوره از قواعد بهرهبرداري است. اين قواعد ساختاري نزديک به قواعد بکار رفته در منطق فازي دارند. نتيجه آن ارائه کنترل کنندههاي فازي توسط سازندگان بزرگ سيستمهاي کنترل کارخانههاي سيمان است. در همين راستا و با هدف قراردادن طراحي و ساخت چنين سيستمي در کشور، محققان اين گروه با همکاري کارشناسان شرکت سيمان ساوه در اين راه قدم گذاشتهاند. هم اکنون با توجه به اطلاعات اندازهگيري شده از کوره سيمان سفيد ساوه يک شبيهساز هوشمند (سیمولاتور) براساس شبکههاي عصبي براي کوره ايجاد شده است. سپس بر اساس اين شبيهساز، کنترل کننده فازي براي کوره طراحي و برروي شبيهساز آزمايش شده است. علاوه بر آن با تحلیل دادههای دریافتی از کوره و آنالیز آنها مسئله تشخیص عیب یا ناهنجاری در عمکرد کوره مورد توجه قرار گرفته و در نتیجه پیشآمدن پدیدههای از جمله عیب گرفتگی ورودی کوره، پیش گرمی یا پیش سردی مواد و گرفتگی داخل کوره (کوتینگ) در عملکرد کوره تشخیص داده شده است.

تخصیص بهینه محرک در حلقه کنترل
برخی از سیستمها مانند وسایل نقلیه هوایی و دریایی به دلایلی از جمله افزایش مانورپذیری، قابلیت اطمینان و تحملپذیری در برابر عیب، با محرک¬های افزونه طراحی می¬شوند. این سیستمها دارای تعداد محرک بیشتری نسبت به متغیرهای کنترلی خود هستند. طراحی الگوریتم کنترل سیستمهای محرک افزونه چالش برانگیز است، زیرا با ترکیب -های متفاوتی از محرک¬های در دسترس می¬توان مطلوبیتهای مختلفی در سیستم کنترل را فراهم نمود، علاوه بر آنکه محدودیتهای فیزیکی هر محرک نیز باید لحاظ گردد. به منظور مدیریت سیستمی این موضوع، می¬توان مسئله کنترل را به دو بخش تقسیم نمود: یک کنترل کننده که مقدار مطلوب سیگنال کنترل مجازی را بر اساس عملکرد مورد انتظار از خروجی یا همان متغیر کنترل شونده را تعیین می¬کند و یک واحد تخصیص کنترل (Control allocation) که سیگنال کنترل مجازی را به سیگنال کنترل واقعی دستگاه نگاشت می¬دهد. وظیفه اصلی واحد تخصیص کنترل، تولید فرمان محرک¬ها است به گونه¬ای که اولا مقدار مطلوب کنترل مجازی فراهم گردد و ثانیا قیود حاکم بر هر محرک تامین گردد. به منظور رسیدن به یک الگوریتم بهینه در طراحی واحد تخصیص کنترل، چندین پروژه تحقیقاتی در گروه پژوهشی انجام شده است تا با شناسایی وضعیت محرکها در صورت وقوع عیب و در نظر گرفتن فضای شدنی عملکرد محرکها، تخصیص محرک با هدف دستیابی به یک سیستم تحمل پذیر عیب انجام پذیرد.

ساختار سیستم تخصیص بهینه محرکها
تخصیص بهینه محرک در حلقه کنترل
برخی از سیستمها مانند وسایل نقلیه هوایی و دریایی به دلایلی از جمله افزایش مانورپذیری، قابلیت اطمینان و تحملپذیری در برابر عیب، با محرک¬های افزونه طراحی می¬شوند. این سیستمها دارای تعداد محرک بیشتری نسبت به متغیرهای کنترلی خود هستند. طراحی الگوریتم کنترل سیستمهای محرک افزونه چالش برانگیز است، زیرا با ترکیب -های متفاوتی از محرک¬های در دسترس می¬توان مطلوبیتهای مختلفی در سیستم کنترل را فراهم نمود، علاوه بر آنکه محدودیتهای فیزیکی هر محرک نیز باید لحاظ گردد. به منظور مدیریت سیستمی این موضوع، می¬توان مسئله کنترل را به دو بخش تقسیم نمود: یک کنترل کننده که مقدار مطلوب سیگنال کنترل مجازی را بر اساس عملکرد مورد انتظار از خروجی یا همان متغیر کنترل شونده را تعیین می¬کند و یک واحد تخصیص کنترل (Control allocation) که سیگنال کنترل مجازی را به سیگنال کنترل واقعی دستگاه نگاشت می¬دهد. وظیفه اصلی واحد تخصیص کنترل، تولید فرمان محرک¬ها است به گونه¬ای که اولا مقدار مطلوب کنترل مجازی فراهم گردد و ثانیا قیود حاکم بر هر محرک تامین گردد. به منظور رسیدن به یک الگوریتم بهینه در طراحی واحد تخصیص کنترل، چندین پروژه تحقیقاتی در گروه پژوهشی انجام شده است تا با شناسایی وضعیت محرکها در صورت وقوع عیب و در نظر گرفتن فضای شدنی عملکرد محرکها، تخصیص محرک با هدف دستیابی به یک سیستم تحمل پذیر عیب انجام پذیرد.

طراحی و ساخت سیستمهای مکاترونیکی و رباتیکی
ساخت سیستمهای مکاترونیکی با نگرشهای گوناگون از جمله تواناییهای مجموعههای آزمایشی گروه APAC می-باشد. از جمله این ساختارها میتوان به:
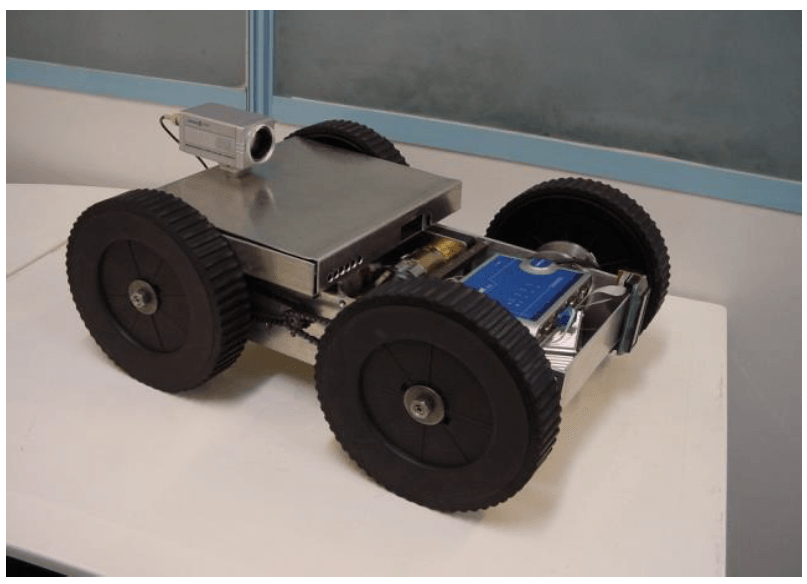
الف) رباتهای متحرک با قابلیتهای مانور سریع و رفتار آشوبگونه (Chaotic)
این مجموعه بر مبنای نحوه عملکرد سیگنال آشوب به عنوان ورودی به ربات و خروجی موقعیت آن جهت جاروب نمودن یک سطح به صورت بهینه است تا کمترین انرژی مصرفی را ببرد.

ب) سیستمهای تعادلیRoll Stand وVectored Multi Rotor
این ساختارها با الهام گیری از هواپیماهای عمود پرواز تیلت روتور طراحی و ساخته شده است. این دستگاه ابزاری چند منظوره برای دانشجویان مکاترونیک میباشد.

طراحی و ساخت سیستمهای مکاترونیکی و رباتیکی
ساخت سیستمهای مکاترونیکی با نگرشهای گوناگون از جمله تواناییهای مجموعههای آزمایشی گروه APAC می-باشد. از جمله این ساختارها میتوان به:
الف) رباتهای متحرک با قابلیتهای مانور سریع و رفتار آشوبگونه (Chaotic)
این مجموعه بر مبنای نحوه عملکرد سیگنال آشوب به عنوان ورودی به ربات و خروجی موقعیت آن جهت جاروب نمودن یک سطح به صورت بهینه است تا کمترین انرژی مصرفی را ببرد.
ب) سیستمهای تعادلیRoll Stand وVectored Multi Rotor
این ساختارها با الهام گیری از هواپیماهای عمود پرواز تیلت روتور طراحی و ساخته شده است. این دستگاه ابزاری چند منظوره برای دانشجویان مکاترونیک میباشد.

ربات متحرک دو چرخ تعادلی
یکی از ابزارهای مهم کنونی برای حمل و نقل سیستمهای تعادلی دوچرخ میباشند. این مساله یک پاندول معکوس که روی یک ارابه قرار گرفته است میباشد، که قابلیت مانور مناسبی در حرکت به راکب میدهد. این پروژه ماکتی از این سیستم را طراحی و ساخته است.
ارتفاع این ربات حدود 40 سانتیمتر و عرض بدنه آن حدود 20 سانتیمتر میباشد. برای اندازهگیری زاویه پاندول از یک حسگر جایرو و یک حسگر شتابسنج استفاده شده است. اطلاعات این دو سنسور برای داشتن زاویهای بدون نویز و دریفت توسط فیلتر کالمن با یکدیگر ترکیب میشود.
شناسایی این سیستم توسط روشهای جعبه سیاه با مدلهای خطی و غیرخطی صورت پذیرفته است. مدل شبیهساز آن نیز طراحی گردیده است. همچنین کنترلکنندههای گوناگونی از PID و LQR تا کنترلگرهای هوشمند بروی این سیستم پیادهسازی شدهاند.

ربات متحرک دو چرخ تعادلی
یکی از ابزارهای مهم کنونی برای حمل و نقل سیستمهای تعادلی دوچرخ میباشند. این مساله یک پاندول معکوس که روی یک ارابه قرار گرفته است میباشد، که قابلیت مانور مناسبی در حرکت به راکب میدهد. این پروژه ماکتی از این سیستم را طراحی و ساخته است.
ارتفاع این ربات حدود 40 سانتیمتر و عرض بدنه آن حدود 20 سانتیمتر میباشد. برای اندازهگیری زاویه پاندول از یک حسگر جایرو و یک حسگر شتابسنج استفاده شده است. اطلاعات این دو سنسور برای داشتن زاویهای بدون نویز و دریفت توسط فیلتر کالمن با یکدیگر ترکیب میشود.
شناسایی این سیستم توسط روشهای جعبه سیاه با مدلهای خطی و غیرخطی صورت پذیرفته است. مدل شبیهساز آن نیز طراحی گردیده است. همچنین کنترلکنندههای گوناگونی از PID و LQR تا کنترلگرهای هوشمند بروی این سیستم پیادهسازی شدهاند.

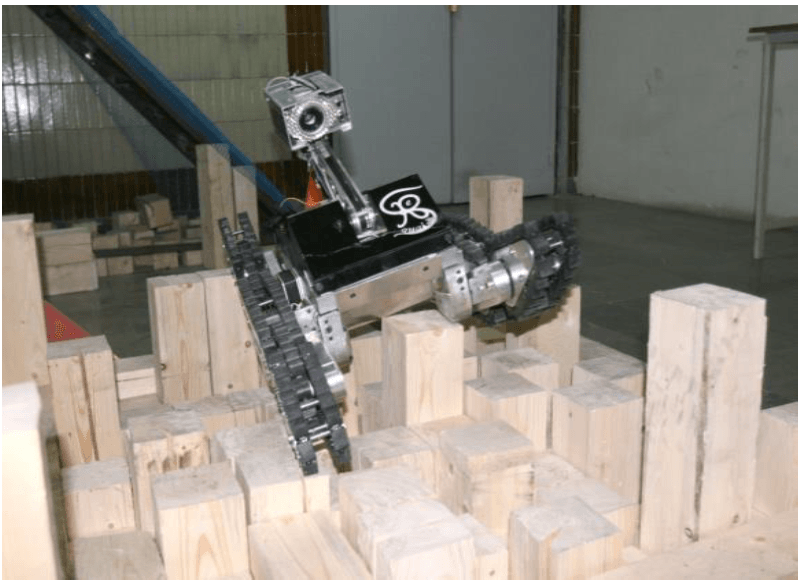
طراحي و ساخت رباتهای امدادگر موبايل
رباتهاي امدادگر (rescue robot) موبايل در آینده يکي از تجهيزات اساسي در هنگام وقوع سوانح طبيعي نظير زلزله، سيل و … خواهند بود. اين رباتها با حرکت در محل وقوع حادثه، اقدام به يافتن انسانهاي زنده زير آوار مينمايد. علاوه بر این با پیشرفت این رباتها میتوان از آنها در کاربردهای صنعتی از جمله بازرسی دستگاهها و تجهیزات در فواصل دور استفاده نمود. در اين راستا رباتهاي گوناگوني در اين دانشگاه طراحي شده اند که قابليت حرکت برروي سطوح ناهموار و پله نوردي و سطوح شيب دار با شيب تند را دارا ميباشند. به منظور آزمون قابليتهاي اين رباتها به ويژه در مقايسه با ساير رباتهاي ساخته شده، اين رباتها در چندین مسابقه رباتيکي داخلي و خارجي (Robocup) شرکت داده شدهاند که حاصل آن کسب چندين عنوان داخلي و جهاني است. از جمله اين نتايج ميتوان به مقام اول بهترين رابط انسان و ماشين در مسابقات RoboCup2006 آلمان، مقام دوم در مسابقات رباتهاي امدادگر 1385 تهران، مقاوم دوم در مسابفات Iran Open 2006 و Iran Open 2007، مقام دوم بهترين طراحي در مسابقات جهاني RoboCup2005 ژاپن، مقام سوم امداد و نجات و مقام دوم بهترين قابليت مانور در مسابقات جهاني RoboCup2008 چين را ميتوان نام برد. ساخت این رباتها با حمایت مدیریت پژوهش و فناوری شرکت ملی نفت ایران انجام شده است.
طراحي و ساخت رباتهای امدادگر موبايل
رباتهاي امدادگر (rescue robot) موبايل در آینده يکي از تجهيزات اساسي در هنگام وقوع سوانح طبيعي نظير زلزله، سيل و … خواهند بود. اين رباتها با حرکت در محل وقوع حادثه، اقدام به يافتن انسانهاي زنده زير آوار مينمايد. علاوه بر این با پیشرفت این رباتها میتوان از آنها در کاربردهای صنعتی از جمله بازرسی دستگاهها و تجهیزات در فواصل دور استفاده نمود. در اين راستا رباتهاي گوناگوني در اين دانشگاه طراحي شده اند که قابليت حرکت برروي سطوح ناهموار و پله نوردي و سطوح شيب دار با شيب تند را دارا ميباشند. به منظور آزمون قابليتهاي اين رباتها به ويژه در مقايسه با ساير رباتهاي ساخته شده، اين رباتها در چندین مسابقه رباتيکي داخلي و خارجي (Robocup) شرکت داده شدهاند که حاصل آن کسب چندين عنوان داخلي و جهاني است. از جمله اين نتايج ميتوان به مقام اول بهترين رابط انسان و ماشين در مسابقات RoboCup2006 آلمان، مقام دوم در مسابقات رباتهاي امدادگر 1385 تهران، مقاوم دوم در مسابفات Iran Open 2006 و Iran Open 2007، مقام دوم بهترين طراحي در مسابقات جهاني RoboCup2005 ژاپن، مقام سوم امداد و نجات و مقام دوم بهترين قابليت مانور در مسابقات جهاني RoboCup2008 چين را ميتوان نام برد. ساخت این رباتها با حمایت مدیریت پژوهش و فناوری شرکت ملی نفت ایران انجام شده است.

(APC) گسترش روشها و کاربرد كنترل فرآيند پيشرفته
تکنولوژی كنترل فرآيند پيشرفته (Advanced Process Control – APC) یکی از جدیدترین تکنولوژیها در كنترل كارخانجات صنعتي است. عموم شركتهاي بزرگ و مطرح بينالمللي ارائه كننده سيستمهاي كنترل و اتوماسيون صنعتي، يك بسته APCنيز براي مشتريان خود ارائه ميدهند. هدف ازAPC طراحي كنترل كنندهاي در سطح بالا براي فرآيند است كه بتواند مشخصاتي مثل مصرف انرژي، شكل تغيير متغيرهاي فرآيند از ديدگاه سرعت پاسخ، رعايت محدوديتهاي فني متغيرها و در نتيجه داشتن كيفيت خوب و در عين حال عمر طولاني تجهيزات و موارد ديگر را مد نظر قرار دهد. براي رسيدن به اين منظور در گروه اِیپک علاوه بر تحقیقات نظری در ارائه روشهاي پيشرفته كنترل، این روشها در عمل بر روي فرآيندهاي آزمايشگاهي نمونه (pilot plant) كنترل pH، كنترل سطح، كنترل جريان مايع، كنترل فشار هوا، كنترل حرارت، و دستگاه آزمايشگاهي چهار تانک بكارگرفته و آزمايش شدهاند. تئوریهايی که تاکنون در این تحقیقات بکار رفتهاند عبارتند از کنترل تطبیقی، کنترل مقاوم، کنترل کننده شبکه عصبی، کنترل کننده فازی، کنترل کننده پیشبین خطی و غیرخطی، کنترل کننده چندگانه و کنترل کننده PID خودتنظیم.
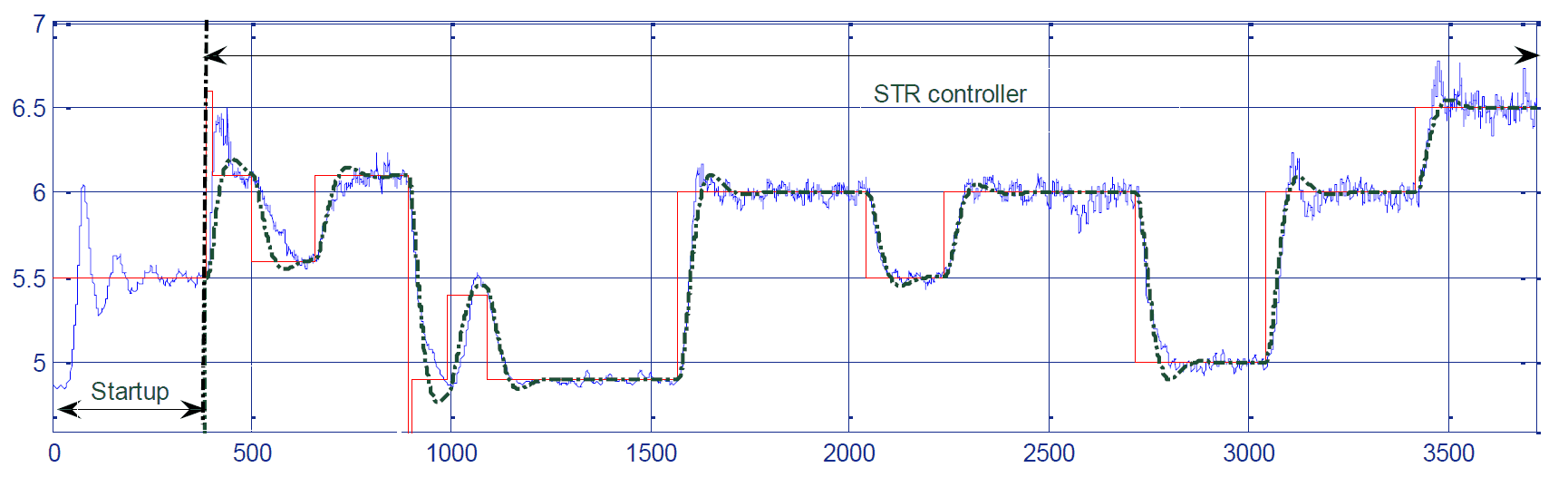
نتیجه اجرای ساختار کنترلي STR برروی دستگاه کنترل pH.
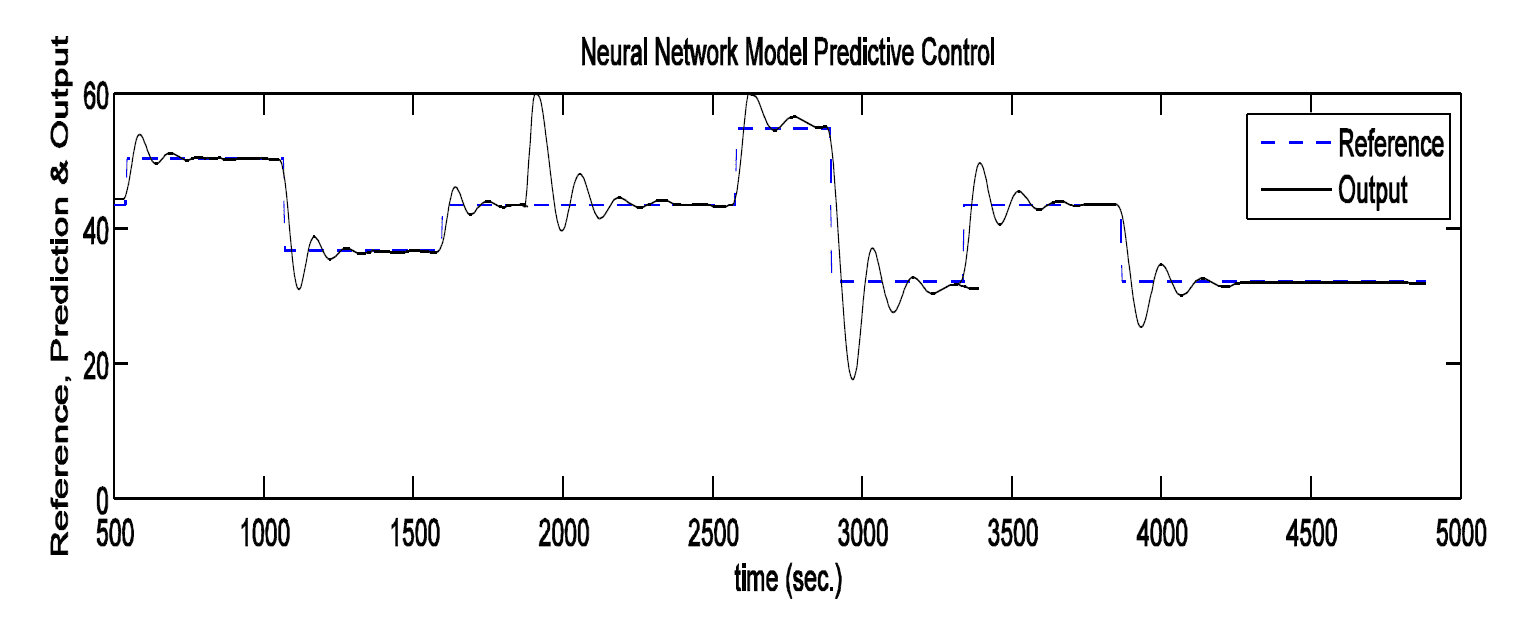
نتیجه اجرای کنترل پیشبین غیرخطی شبکه عصبی برروی دستگاه کنترل سطح
(APC) گسترش روشها و کاربرد كنترل فرآيند پيشرفته
تکنولوژی كنترل فرآيند پيشرفته (Advanced Process Control – APC) یکی از جدیدترین تکنولوژیها در كنترل كارخانجات صنعتي است. عموم شركتهاي بزرگ و مطرح بينالمللي ارائه كننده سيستمهاي كنترل و اتوماسيون صنعتي، يك بسته APCنيز براي مشتريان خود ارائه ميدهند. هدف ازAPC طراحي كنترل كنندهاي در سطح بالا براي فرآيند است كه بتواند مشخصاتي مثل مصرف انرژي، شكل تغيير متغيرهاي فرآيند از ديدگاه سرعت پاسخ، رعايت محدوديتهاي فني متغيرها و در نتيجه داشتن كيفيت خوب و در عين حال عمر طولاني تجهيزات و موارد ديگر را مد نظر قرار دهد. براي رسيدن به اين منظور در گروه اِیپک علاوه بر تحقیقات نظری در ارائه روشهاي پيشرفته كنترل، این روشها در عمل بر روي فرآيندهاي آزمايشگاهي نمونه (pilot plant) كنترل pH، كنترل سطح، كنترل جريان مايع، كنترل فشار هوا، كنترل حرارت، و دستگاه آزمايشگاهي چهار تانک بكارگرفته و آزمايش شدهاند. تئوریهايی که تاکنون در این تحقیقات بکار رفتهاند عبارتند از کنترل تطبیقی، کنترل مقاوم، کنترل کننده شبکه عصبی، کنترل کننده فازی، کنترل کننده پیشبین خطی و غیرخطی، کنترل کننده چندگانه و کنترل کننده PID خودتنظیم.

و چهار تانک pH طراحي و ساخت دستگاههاي آزمايشگاهي کنترل
کنترل فرآيندهاي صنعتي يکي از شاخههاي مهم کنترل و اتوماسيون ميباشد که صنايع وسيعي همچون صنايع نفت، پتروشيمي، نيروگاهها، صنايع غذايي و بهداشتي را در برميگيرد. با اين وجود با توجه به بزرگي تجهيزات موجود در اين صنايع و هزينه بالاي اين تجهيزات امکان در اختيار داشتن آنها در طي مراحل تحقيقاتي به آساني ميسر نميباشد. به همين جهت در آزمايشگاههاي کنترل فرآيند در مراکز تحقيقاتي و دانشگاهي از دستگاههاي نمونه آزمايشگاهياي (Pilot Plant) که ميتوانند شرايط مختلف کاري فرآيندها را مشابهسازی کنند براي آزمايش تئوريهاي کنترل استفاده ميشود. در اين راستا محققان اين گروه اقدام به طراحي و ساخت دو دستگاه کنترل pH و دستگاه چهار تانک نمودهاند. کنترل pH در صنايع فرآيندي يکي از مشکلترين حلقههاي کنترل است و در نتيجه به عنوان چالش مهم در بکارگيري و مقايسه روشهاي کنترلي در بين محققان شناخته ميشود. اين دستگاه علاوه بر کنترل pH، قابليت کنترل همزمان سه متغير ديگر سطح مايع و حرارت راکتور اصلي و فلوي مايع خروجي از آن را نیز دارد. دستگاه چهار تانک يکي ديگر از دستگاههاي شناخته شده براي آزمايش تئوريهاي کنترل پيشرفته به ويژه براي فرآيندهاي داراي چندين ورودي و خروجي است. در دستگاه طراحي شده در اين دانشگاه امکان کنترل پنج متغير شامل سطوح چهار تانک و فلوي خروجي از يکي از تانکها وجود دارد.

نمایی از دستگاه کنترل 4-تانک

نمايي از دستگاه کنترل pH
و چهار تانک pH طراحي و ساخت دستگاههاي آزمايشگاهي کنترل
کنترل فرآيندهاي صنعتي يکي از شاخههاي مهم کنترل و اتوماسيون ميباشد که صنايع وسيعي همچون صنايع نفت، پتروشيمي، نيروگاهها، صنايع غذايي و بهداشتي را در برميگيرد. با اين وجود با توجه به بزرگي تجهيزات موجود در اين صنايع و هزينه بالاي اين تجهيزات امکان در اختيار داشتن آنها در طي مراحل تحقيقاتي به آساني ميسر نميباشد. به همين جهت در آزمايشگاههاي کنترل فرآيند در مراکز تحقيقاتي و دانشگاهي از دستگاههاي نمونه آزمايشگاهياي (Pilot Plant) که ميتوانند شرايط مختلف کاري فرآيندها را مشابهسازی کنند براي آزمايش تئوريهاي کنترل استفاده ميشود. در اين راستا محققان اين گروه اقدام به طراحي و ساخت دو دستگاه کنترل pH و دستگاه چهار تانک نمودهاند. کنترل pH در صنايع فرآيندي يکي از مشکلترين حلقههاي کنترل است و در نتيجه به عنوان چالش مهم در بکارگيري و مقايسه روشهاي کنترلي در بين محققان شناخته ميشود. اين دستگاه علاوه بر کنترل pH، قابليت کنترل همزمان سه متغير ديگر سطح مايع و حرارت راکتور اصلي و فلوي مايع خروجي از آن را نیز دارد. دستگاه چهار تانک يکي ديگر از دستگاههاي شناخته شده براي آزمايش تئوريهاي کنترل پيشرفته به ويژه براي فرآيندهاي داراي چندين ورودي و خروجي است. در دستگاه طراحي شده در اين دانشگاه امکان کنترل پنج متغير شامل سطوح چهار تانک و فلوي خروجي از يکي از تانکها وجود دارد.

کنترل سيستمهای آشوبی
آشوب يك خاصيت ديناميكي است كه در سيستمهاي غيرخطي زمان پيوسته و گسسته، در برخي شرايط خاص، بروز ميكند که در آن با وجود تغییرات کوچک در مقدار اولیه تفاوت زیادی در مقدار نهایی بوجود میآید. نتیجه آن رفتاری شبه تصادفی در دینامیک سیستم است که ممکن است با رفتار تصادفی اشتباه گرفته شود. علیرغم دینامیک پیچیده و ناپایداری ذاتی سیستم آشوبی، سیستمهای آشوبی قابلیت کنترل شدن دارند و اهداف کنترلی متفاوتی را میتوان برایشان در نظر گرفت. در طی تحقیقات انجام شده در گروه پژوهشی اِیپک روشهای مختلفی برای کنترل سیستمهای آشوبی ارایه شدهاند که از آن جملهاند کنترل با استفاده از فیدبک تأخیری (Time Delay Feedback-TDF) که از کاربردیترین روشهای کنترل آشوب است و نیز روشهای پیشرفتهای چون کنترل تطبیقی و مود لغزشی در سیستمهای آشوبی.
یکی دیگر از روشهای کنترل آشوب روش OGY (Ott, Grebogi, Yorke) است که از روشهای مؤثر بوده و سرآغازی بر برخی روشهای کنترل آشوب است. از مزایای آن میتوان به عدم نیاز به دانستن مدل کلی سیستم اشاره کرد. در این روش با اعمال تغییرات جزئی دریکی از متغیرهای کنترلی سیستم و با استفاده از خواص ذاتی سیستمهای آشوبی، پایدارسازی سیستم انجام میشود. به طور ویژه، کنترل سیستمهای چندمتغیره آشوبناک و همچنین ایجاد ارتباط بین کنترل آشوب و سیستمهای چند آشوبی (متشکل از زیرسیستمهای آشوبی و دارای ارتباط با یکدیگر) و تعمیم کنترل OGY به آنها به صورتی که در آن بهطور همزمان امکان اعمال تغییر در چند متغیر کنترلی سیستم چند آشوبی وجود داشته باشد، با توجه به اهمیت عملی آنها مورد توجه محققان گروه قرار گرفته است.
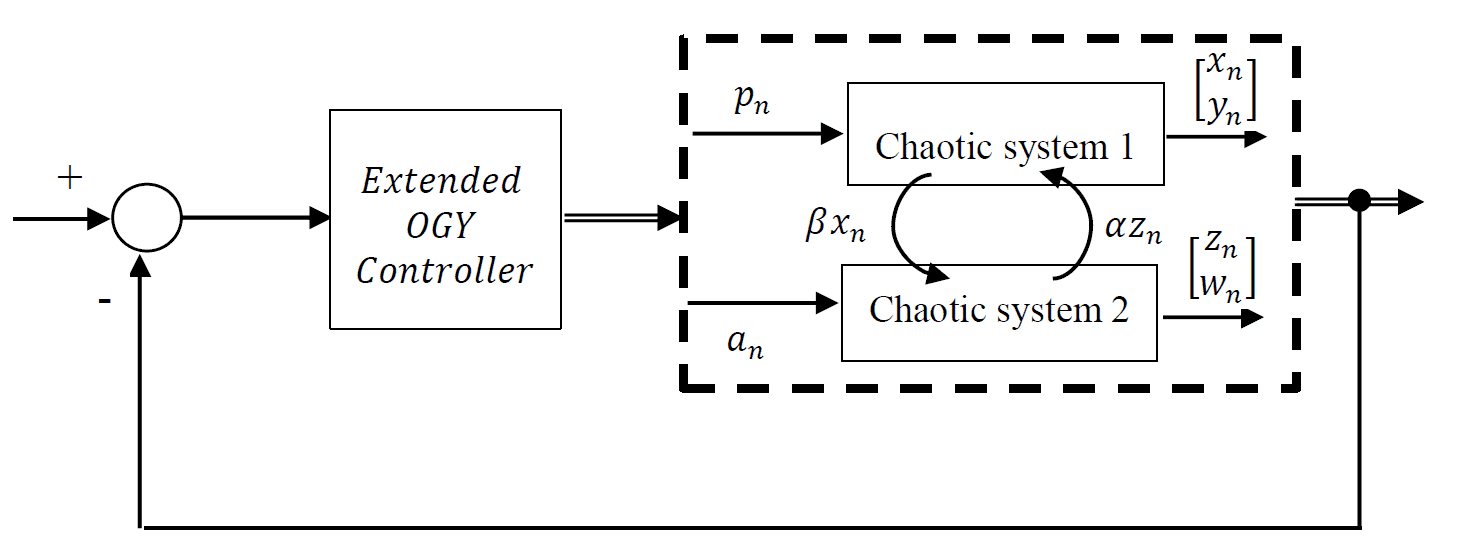
ساختار کنترلی سيستمهاي چند آشوبی با استفاده از کنترل تعمیم یافته OGY
کنترل سيستمهای آشوبی
آشوب يك خاصيت ديناميكي است كه در سيستمهاي غيرخطي زمان پيوسته و گسسته، در برخي شرايط خاص، بروز ميكند که در آن با وجود تغییرات کوچک در مقدار اولیه تفاوت زیادی در مقدار نهایی بوجود میآید. نتیجه آن رفتاری شبه تصادفی در دینامیک سیستم است که ممکن است با رفتار تصادفی اشتباه گرفته شود. علیرغم دینامیک پیچیده و ناپایداری ذاتی سیستم آشوبی، سیستمهای آشوبی قابلیت کنترل شدن دارند و اهداف کنترلی متفاوتی را میتوان برایشان در نظر گرفت. در طی تحقیقات انجام شده در گروه پژوهشی اِیپک روشهای مختلفی برای کنترل سیستمهای آشوبی ارایه شدهاند که از آن جملهاند کنترل با استفاده از فیدبک تأخیری (Time Delay Feedback-TDF) که از کاربردیترین روشهای کنترل آشوب است و نیز روشهای پیشرفتهای چون کنترل تطبیقی و مود لغزشی در سیستمهای آشوبی.
یکی دیگر از روشهای کنترل آشوب روش OGY (Ott, Grebogi, Yorke) است که از روشهای مؤثر بوده و سرآغازی بر برخی روشهای کنترل آشوب است. از مزایای آن میتوان به عدم نیاز به دانستن مدل کلی سیستم اشاره کرد. در این روش با اعمال تغییرات جزئی دریکی از متغیرهای کنترلی سیستم و با استفاده از خواص ذاتی سیستمهای آشوبی، پایدارسازی سیستم انجام میشود. به طور ویژه، کنترل سیستمهای چندمتغیره آشوبناک و همچنین ایجاد ارتباط بین کنترل آشوب و سیستمهای چند آشوبی (متشکل از زیرسیستمهای آشوبی و دارای ارتباط با یکدیگر) و تعمیم کنترل OGY به آنها به صورتی که در آن بهطور همزمان امکان اعمال تغییر در چند متغیر کنترلی سیستم چند آشوبی وجود داشته باشد، با توجه به اهمیت عملی آنها مورد توجه محققان گروه قرار گرفته است.